《電力拖動(dòng)控制線路與技能訓(xùn)練(第四版):第二單元 課題十一串勵(lì)直流電動(dòng)機(jī)的基本控制電路》由會(huì)員分享����,可在線閱讀,更多相關(guān)《電力拖動(dòng)控制線路與技能訓(xùn)練(第四版):第二單元 課題十一串勵(lì)直流電動(dòng)機(jī)的基本控制電路(37頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索����。
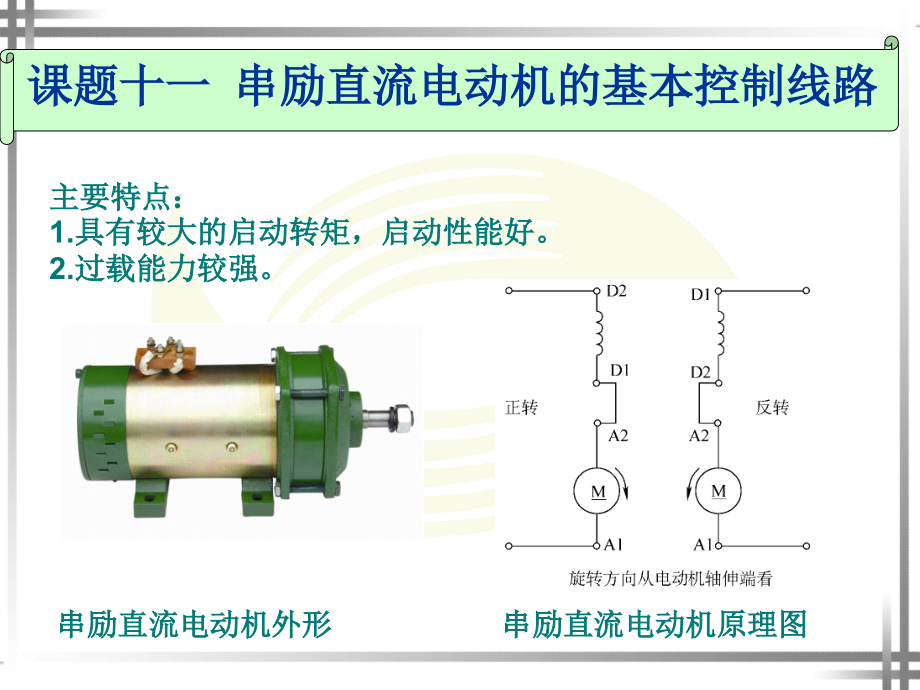
1����、課題十一課題十一 串勵(lì)直流電動(dòng)機(jī)的基本控制線路串勵(lì)直流電動(dòng)機(jī)的基本控制線路主要特點(diǎn):主要特點(diǎn):1.具有較大的啟動(dòng)轉(zhuǎn)矩����,啟動(dòng)性能好。具有較大的啟動(dòng)轉(zhuǎn)矩����,啟動(dòng)性能好。2.過載能力較強(qiáng)����。過載能力較強(qiáng)。串勵(lì)直流電動(dòng)機(jī)外形串勵(lì)直流電動(dòng)機(jī)外形 串勵(lì)直流電動(dòng)機(jī)原理圖串勵(lì)直流電動(dòng)機(jī)原理圖 一����、啟動(dòng)控制線路1.手動(dòng)啟動(dòng)控制線路手動(dòng)啟動(dòng)控制線路串勵(lì)直流電動(dòng)機(jī)手動(dòng)啟動(dòng)控制電路圖串勵(lì)直流電動(dòng)機(jī)手動(dòng)啟動(dòng)控制電路圖 QFKT1KT1KM1KM2L+KM2LSB2SB1KM1KM1KM3R22.自動(dòng)啟動(dòng)控制線路自動(dòng)啟動(dòng)控制線路MR1KM1KT2KM3電路組成分析電路組成分析KT2QFKT1KT1KM1KM2L+KM2LSB
2、2SB1KM1KM1KM3R22.自動(dòng)啟動(dòng)控制線路自動(dòng)啟動(dòng)控制線路MR1KM1KT2KM3KT2合上電源開關(guān)合上電源開關(guān)QFQFKT1KT1KM1KM2L+KM2LSB2SB1KM1KM1KM3R22.自動(dòng)啟動(dòng)控制線路自動(dòng)啟動(dòng)控制線路MR1KM1KT2KM3KT2按下按下SB1KM1線圈得電線圈得電QFKT1KT1KM1KM2L+KM2LSB2SB1KM1KM1KM3R22.自動(dòng)啟動(dòng)控制線路自動(dòng)啟動(dòng)控制線路MR1KM1KT2KM3KT2KT1經(jīng)過整定時(shí)間經(jīng)過整定時(shí)間KT1動(dòng)斷觸頭延時(shí)閉合動(dòng)斷觸頭延時(shí)閉合QFKT1KT1KM1KM2L+KM2LSB2SB1KM1KM1KM3R22.自動(dòng)啟動(dòng)控制線
3����、路自動(dòng)啟動(dòng)控制線路MR1KM1KT2KM3KT2KT2經(jīng)過整定時(shí)間經(jīng)過整定時(shí)間KT2動(dòng)斷觸頭延時(shí)閉合動(dòng)斷觸頭延時(shí)閉合進(jìn)入正常工作進(jìn)入正常工作QFKT1KT1KM1KM2L+KM2LSB2SB1KM1KM1KM3R22.自動(dòng)啟動(dòng)控制線路自動(dòng)啟動(dòng)控制線路MR1KM1KT2KM3KT2按下按下SB2,電動(dòng)機(jī)停轉(zhuǎn)電動(dòng)機(jī)停轉(zhuǎn)二、正反轉(zhuǎn)控制線路串勵(lì)直流電動(dòng)機(jī)的反轉(zhuǎn)常采用勵(lì)磁繞組反接法來串勵(lì)直流電動(dòng)機(jī)的反轉(zhuǎn)常采用勵(lì)磁繞組反接法來實(shí)現(xiàn)����。因?yàn)榇畡?lì)電動(dòng)機(jī)電樞繞組兩端的電壓很高,而實(shí)現(xiàn)����。因?yàn)榇畡?lì)電動(dòng)機(jī)電樞繞組兩端的電壓很高����,而勵(lì)磁繞組兩端的電壓較低,反接較容易����。勵(lì)磁繞組兩端的電壓較低,反接較容易����。KM3KM2KM2
4、KM1SB2KM2KM3KM1KM2L+L-KTKM2SB3KM1SB1KTKM1KM1RQFKM2KM1電路組成分析電路組成分析KM2KM1M串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路KM3KM2KM2KM1SB2KM2KM3KM1KM2L+L-KTKM2SB3KM1SB1KM1KM1R串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路QFKM2KM1合上電源開關(guān)合上電源開關(guān)QFKM2KM1MKTKM3KM2KM2KM1SB2KM2KM3KM1KM2L+L-KTKM2SB3KM1SB1KM1KM1R串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路QFKM2KM1正轉(zhuǎn)控制:正轉(zhuǎn)
5����、控制:按下按下SB1,電����,電動(dòng)機(jī)串聯(lián)電阻動(dòng)機(jī)串聯(lián)電阻R正轉(zhuǎn)起動(dòng)����,正轉(zhuǎn)起動(dòng)����,KT線圈失電線圈失電KM2KM1MKTKM3KM2KM2KM1SB2KM2KM3KM1KM2L+L-KTKM2SB3KM1SB1KM1KM1R串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路QFKM2KM1KT動(dòng)斷觸頭動(dòng)斷觸頭延時(shí)閉合,延時(shí)閉合����,KM3得電,起得電����,起動(dòng)過程結(jié)束動(dòng)過程結(jié)束KM2KM1MKTKM3KM2KM2KM1SB2KM2KM3KM1KM2L+L-KTKM2SB3KM1SB1KM1KM1R串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路QFKM2KM1按下按下SB3,電����,電動(dòng)機(jī)停轉(zhuǎn)動(dòng)機(jī)停轉(zhuǎn)KM2
6、KM1MKTKM3KM2KM2KM1SB2KM2KM3KM1KM2L+L-KTKM2SB3KM1SB1KM1KM1R串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路QFKM2KM1反轉(zhuǎn)控制:反轉(zhuǎn)控制:按下按下SB2����,電,電動(dòng)機(jī)串聯(lián)電阻動(dòng)機(jī)串聯(lián)電阻R反轉(zhuǎn)起動(dòng)����,反轉(zhuǎn)起動(dòng)����,KT線圈失電線圈失電KM2KM1MKTKM3KM2KM2KM1SB2KM2KM3KM1KM2L+L-KTKM2SB3KM1SB1KM1KM1R串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路串勵(lì)直流電機(jī)正反轉(zhuǎn)控制線路QFKM2KM1KT動(dòng)斷觸頭動(dòng)斷觸頭延時(shí)閉合����,延時(shí)閉合,KM3得電����,起得電����,起動(dòng)過程結(jié)束動(dòng)過程結(jié)束KM2KM1MKT三、制動(dòng)控制線路1
7����、.能耗制動(dòng)控制電路能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)的能耗制動(dòng)分為自勵(lì)式和他勵(lì)式兩種。串勵(lì)直流電動(dòng)機(jī)的能耗制動(dòng)分為自勵(lì)式和他勵(lì)式兩種����。(1)自勵(lì)式能耗制動(dòng)自勵(lì)式能耗制動(dòng) 自勵(lì)式能耗制動(dòng)是指當(dāng)電動(dòng)機(jī)斷開電源自勵(lì)式能耗制動(dòng)是指當(dāng)電動(dòng)機(jī)斷開電源后,將勵(lì)磁繞組反接并與電樞繞組和制動(dòng)電阻串聯(lián)構(gòu)成閉合后����,將勵(lì)磁繞組反接并與電樞繞組和制動(dòng)電阻串聯(lián)構(gòu)成閉合回路����,使慣性運(yùn)轉(zhuǎn)的電樞處于自勵(lì)發(fā)電狀態(tài)����,產(chǎn)生與原方向回路,使慣性運(yùn)轉(zhuǎn)的電樞處于自勵(lì)發(fā)電狀態(tài)����,產(chǎn)生與原方向相反的電流和電磁轉(zhuǎn)矩,迫使電動(dòng)機(jī)迅速停轉(zhuǎn)����。相反的電流和電磁轉(zhuǎn)矩,迫使電動(dòng)機(jī)迅速停轉(zhuǎn)����。KM3KVKM1SB2KM2KM3KM1KM2L+L-KTKM2SB2KM
8、1SB1KTKM1KM1R串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路QFKM2KM1電路組成分析電路組成分析KM2KM1MKM2KM1KVKM2RBKM3KVKM1SB2KM2KM3KM1KM2L+L-KTKM2SB2KM1SB1KTKM1KM1R串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路QFKM2KM1合上電源開關(guān)合上電源開關(guān)QFKM2KM1MKM2KM1KVKM2RBKM3KVKM1SB2KM2KM3KM1KM2L+L-KTKM2SB2KM1SB1KTKM1KM1R串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控
9����、制電路QFKM2KM1起動(dòng)控制:起動(dòng)控制:按下按下SB1,電����,電動(dòng)機(jī)串聯(lián)電阻動(dòng)機(jī)串聯(lián)電阻R起動(dòng)����,起動(dòng)����,KT線線圈失電圈失電KM2KM1MKM2KM1KVKM2RBKM3KVKM1SB2KM2KM3KM1KM2L+L-KTKM2SB2KM1SB1KTKM1KM1R串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路QFKM2KM1KT動(dòng)斷觸頭動(dòng)斷觸頭延時(shí)閉合,延時(shí)閉合����,KM3得電,起得電����,起動(dòng)過程結(jié)束動(dòng)過程結(jié)束KM2KM1MKM2KM1KVKM2RBKM3KVKM1SB2KM2KM3KM1KM2L+L-KTKM2SB2KM1SB1KTKM1KM1R串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)
10����、控制電路串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路QFKM2KM1按下按下SB2,KM1失電����,能失電,能耗制動(dòng)開始耗制動(dòng)開始KM2KM1MKM2KM1KVKM2RBKM3KVKM1SB2KM2KM3KM1KM2L+L-KTKM2SB2KM1SB1KTKM1KM1R串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)自勵(lì)式能耗制動(dòng)控制電路QFKM2KM1當(dāng)速度降低到當(dāng)速度降低到較低時(shí)����,較低時(shí)����,KV釋放����,各電器釋放,各電器觸頭復(fù)位����,制觸頭復(fù)位,制動(dòng)結(jié)束����。動(dòng)結(jié)束。KM2KM1MKM2KM1KVKM2RB (2)他勵(lì)式能耗制動(dòng)他勵(lì)式能耗制動(dòng) 制動(dòng)時(shí)����,切斷電動(dòng)機(jī)電源,將電樞繞制動(dòng)時(shí)����,切斷電動(dòng)機(jī)電源,將電樞繞組與
11����、放電電阻組與放電電阻R1接通����,將勵(lì)磁繞組與電樞繞組斷開后串入分接通����,將勵(lì)磁繞組與電樞繞組斷開后串入分壓電阻壓電阻R2,再接入外加直流電源勵(lì)磁����。,再接入外加直流電源勵(lì)磁����。KM1SB2KM1KM2L+L-KM2SB1SQ2R3QFKM2KM1電路組成分析電路組成分析KM2KM1MKM2KM1SQ1RR1R2串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路KM1SB2KM1KM2L+L-KM2SB1SQ2R3串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路QFKM2KM1合上電源開關(guān)合上電
12、源開關(guān)QFKM2KM1MKM2KM1SQ1RR1R2KM1SB2KM1KM2L+L-KM2SB1SQ2R3串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路QFKM2KM1按下按下SB1KM2KM1MKM2KM1SQ1RR1R2KM1SB2KM1KM2L+L-KM2SB1SQ2R3串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路QFKM2KM1松開松開SB1KM2KM1MKM2KM1SQ1RR1R2KM1SB2KM1KM2L+L-KM2SB1SQ2R3串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)
13����、式能耗制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)(作伺服電動(dòng)機(jī))他勵(lì)式能耗制動(dòng)控制電路QFKM2KM1按下按下SB2KM2KM1MKM2KM1SQ1RR1R22.串勵(lì)直流電動(dòng)機(jī)反接制動(dòng)控制電路串勵(lì)直流電動(dòng)機(jī)反接制動(dòng)控制電路(1)位能負(fù)載時(shí)轉(zhuǎn)速反向法位能負(fù)載時(shí)轉(zhuǎn)速反向法 這種方法就是強(qiáng)迫電動(dòng)機(jī)的這種方法就是強(qiáng)迫電動(dòng)機(jī)的轉(zhuǎn)速反向����,使電動(dòng)機(jī)的轉(zhuǎn)速方向與電磁轉(zhuǎn)矩的方向相反,轉(zhuǎn)速反向����,使電動(dòng)機(jī)的轉(zhuǎn)速方向與電磁轉(zhuǎn)矩的方向相反����,以實(shí)現(xiàn)制動(dòng)����。以實(shí)現(xiàn)制動(dòng)。KM1KML+L-RBQFKM2電路組成分析電路組成分析MR1R2(2)電樞直接反接法)電樞直接反接法KM1KM2KM3KM4KM5KVKT2KT1KA2KA1KVKAAC前
14����、后KAIKT2KT1KM3KM4KM5KA2KA1KM2KM2KM1KM1KMKMKM1KML+L-RBQFKM2合上電源開關(guān)合上電源開關(guān)QFAC手柄置手柄置“0”位置位置MR1R2KM1KM2KM3KM4KM5KVKT2KT1KA2KA1KVKAAC前后KAIKT2KT1KM3KM4KM5KA2KA1KM2KM2KM1KM1KMKMKM1KML+L-RBQFKM2電動(dòng)機(jī)正轉(zhuǎn)電動(dòng)機(jī)正轉(zhuǎn):AC手柄置手柄置“前前”位置,位置����,KM,KM1線圈線圈得電動(dòng)作得電動(dòng)作,電電動(dòng)機(jī)串聯(lián)電阻動(dòng)機(jī)串聯(lián)電阻起動(dòng)起動(dòng)MR1R2KM1KM2KM3KM4KM5KVKT2KT1KA2KA1KVKAAC前后KAIKT2KT
15、1KM3KM4KM5KA2KA1KM2KM2KM1KM1KMKMKM1KML+L-RBQFKM2KM1動(dòng)合輔助動(dòng)合輔助觸頭閉合����,觸頭閉合,KA1線圈得電線圈得電電阻電阻RB被除被除數(shù)短路數(shù)短路MR1R2KM1KM2KM3KM4KM5KVKT2KT1KA2KA1KVKAAC前后KAIKT2KT1KM3KM4KM5KA2KA1KM2KM2KM1KM1KMKMKM1KML+L-RBQFKM2KT1線圈失電線圈失電其動(dòng)斷觸頭延其動(dòng)斷觸頭延時(shí)閉合����,時(shí)閉合,KM4線圈得電線圈得電MR1R2KM1KM2KM3KM4KM5KVKT2KT1KA2KA1KVKAAC前后KAIKT2KT1KM3KM4KM5KA2K
16、A1KM2KM2KM1KM1KMKMKM1KML+L-RBQFKM2KT2線圈失電線圈失電其動(dòng)斷觸頭延其動(dòng)斷觸頭延時(shí)閉合����,時(shí)閉合,KM5線圈得電線圈得電電動(dòng)機(jī)起動(dòng)完電動(dòng)機(jī)起動(dòng)完畢����,正常運(yùn)行畢,正常運(yùn)行MR1R2KM1KM2KM3KM4KM5KVKT2KT1KA2KA1KVKAAC前后KAIKT2KT1KM3KM4KM5KA2KA1KM2KM2KM1KM1KMKMKM1KML+L-RBQFKM2電樞直接反接電樞直接反接將將AC手柄扳手柄扳置置“后后”位置位置����,電樞因接入反電樞因接入反向電流而制動(dòng)向電流而制動(dòng)MR1R2KM1KM2KM3KM4KM5KVKT2KT1KA2KA1KVKAAC前后KAIKT2KT1KM3KM4KM5KA2KA1KM2KM2KM1KM1KMKM
 電力拖動(dòng)控制線路與技能訓(xùn)練(第四版):第二單元 課題十一串勵(lì)直流電動(dòng)機(jī)的基本控制電路
電力拖動(dòng)控制線路與技能訓(xùn)練(第四版):第二單元 課題十一串勵(lì)直流電動(dòng)機(jī)的基本控制電路