《循跡避障點(diǎn)尋光自動(dòng)小車》由會(huì)員分享����,可在線閱讀,更多相關(guān)《循跡避障點(diǎn)尋光自動(dòng)小車(11頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索����。
1、循跡避障尋光電動(dòng)小汽車
摘要:采用美國(guó)ATMEL公司資源豐富的ATmegal128產(chǎn)品作為主控芯片進(jìn)行設(shè)計(jì)
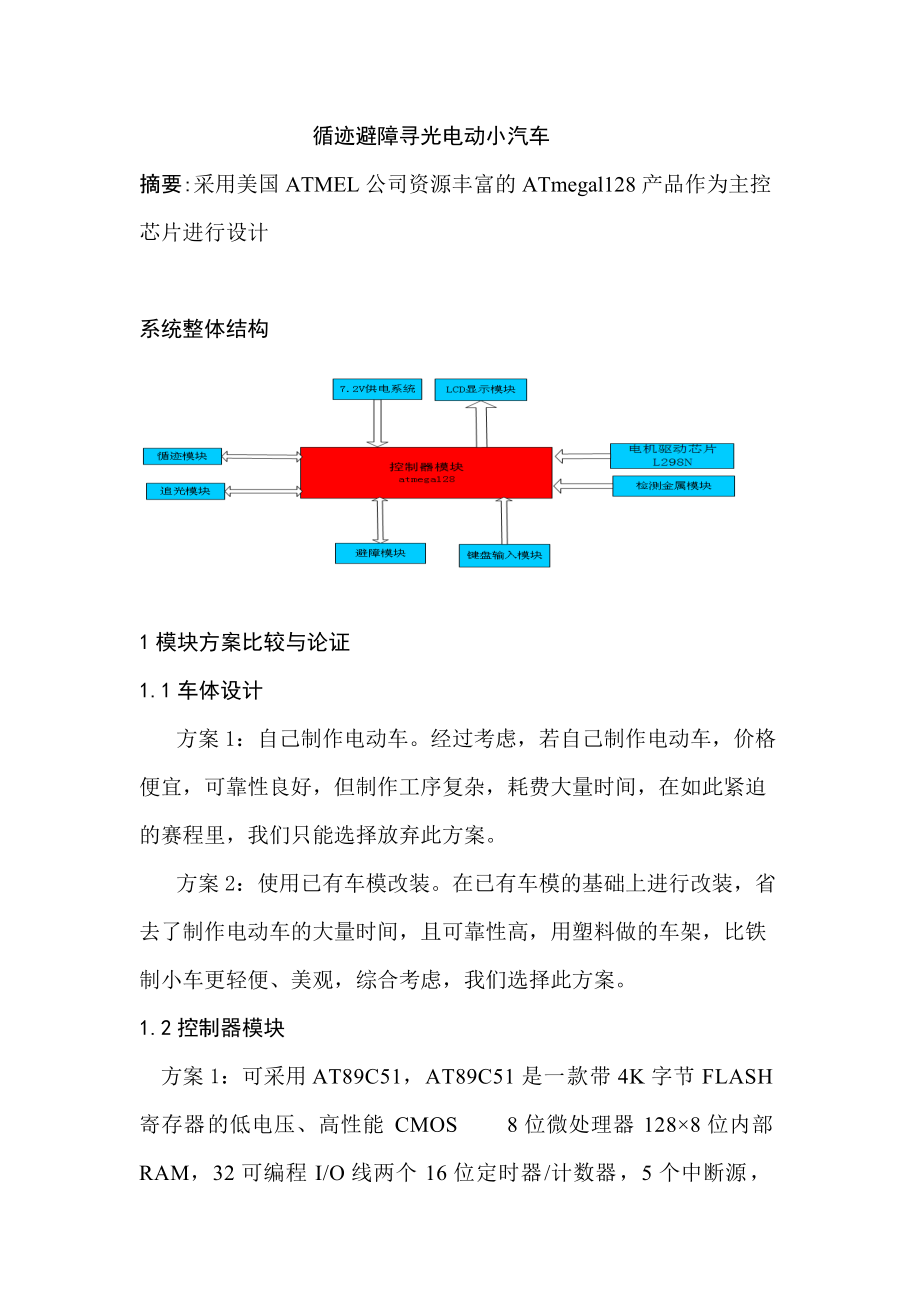
系統(tǒng)整體結(jié)構(gòu)
1模塊方案比較與論證
1.1車體設(shè)計(jì)
方案1:自己制作電動(dòng)車����。經(jīng)過考慮����,若自己制作電動(dòng)車����,價(jià)格便宜,可靠性良好����,但制作工序復(fù)雜,耗費(fèi)大量時(shí)間����,在如此緊迫的賽程里,我們只能選擇放棄此方案����。
方案2:使用已有車模改裝����。在已有車模的基礎(chǔ)上進(jìn)行改裝,省去了制作電動(dòng)車的大量時(shí)間����,且可靠性高����,用塑料做的車架����,比鐵制小車更輕便、美觀����,綜合考慮,我們選擇此方案����。
1.2控制器模塊
方案1:可采用AT89C51,AT89C51是一款帶4K字節(jié)FLASH寄存器的
2����、低電壓、高性能CMOS 8位微處理器1288位內(nèi)部RAM����,32可編程I/O線兩個(gè)16位定時(shí)器/計(jì)數(shù)器,5個(gè)中斷源����,電路簡(jiǎn)單����,編程也比較容易����,資料齊全,芯片很便宜,也很容易買到,適合入門級(jí),由于I/O不足����,一旦數(shù)據(jù)量很大、涉及復(fù)雜運(yùn)動(dòng)控制等內(nèi)容時(shí)����,AT89C51就力不從心了。運(yùn)算的速度和效率低也是AT89C51的一個(gè)缺點(diǎn).����。
方案2:采用美國(guó)ATMEL公司資源豐富的ATmegal128產(chǎn)品作為主控芯片進(jìn)行設(shè)計(jì)。ATmegal128為基于AVR RISC結(jié)構(gòu)的8位低功耗CMOS微處理器����,具有快速����、靈活����、集成度高����、加密性強(qiáng)和易實(shí)現(xiàn)等諸多優(yōu)點(diǎn)。ATmegal128具有128KB的系統(tǒng)內(nèi)可編程FLAS
3����、H、4KB的SRAM����、35個(gè)中斷、53個(gè)通用I/O口線����、32個(gè)通用寄存器、實(shí)時(shí)時(shí)鐘RTC����、4個(gè)靈活的具有比較模式和PWM功能的定時(shí)器/計(jì)數(shù)器(T/C)、2個(gè)USART����、面向字節(jié)的兩線接口TW1����、8通道10位ADC����、具有片內(nèi)振蕩器的可編程看門狗定時(shí)器、SPI串行端口����、與IEEE 1149.1規(guī)范兼容的JTAG測(cè)試接口,以及6種可以通過軟件選擇的省電模式����。
總的來說,CPU構(gòu)架不同����,雖然都是8位的,但指令集不同����,ATmega128是用RISC的,哈佛結(jié)構(gòu)的總線����;AT89C51是用CISC,馮諾衣曼結(jié)構(gòu)的總線����。跟ATmega128比,AT89C51是老掉牙的東西����,內(nèi)部資源少,速度慢����,但學(xué)習(xí)簡(jiǎn)單,經(jīng)
4����、過仔細(xì)比較,我們選擇方案2����。
1.3避障模塊
方案1:用超聲波傳感器進(jìn)行避障。超聲波傳感器在避障系統(tǒng)中普遍使用����,其避障性能很好����,接收與發(fā)射信號(hào)不易受外界干擾����,可以很好的實(shí)現(xiàn)避障的功能,但是����,超聲波傳感器信號(hào)CHULI復(fù)雜,技術(shù)難度較高����,綜合考慮后,放棄此方案����。
方案2:用紅外接收頭和紅外二極管進(jìn)行蔽障,紅外接收頭接受已調(diào)制的信號(hào)����,因此受其它光源的影響較小,能實(shí)現(xiàn)避障的功能����。造價(jià)低����,體積小����,便于裝在小車上����。綜合考慮我選擇此方案。
1.4電機(jī)的選擇
方案1:采用步進(jìn)電機(jī)作為該系統(tǒng)的驅(qū)動(dòng)電機(jī)����。步進(jìn)電機(jī)體積大價(jià)格高昂,且它的輸出力矩較低����,隨轉(zhuǎn)速的升高而下降,且在較高轉(zhuǎn)速時(shí)會(huì)急劇下降����,其轉(zhuǎn)速較
5、低����,不適合于小車等有一定速度要求的系統(tǒng)����。綜合考慮比較����,我們放棄了此方案。
方案2:采用直流電機(jī)����。直流電機(jī)轉(zhuǎn)動(dòng)力矩大,體積小����,重量輕,電路簡(jiǎn)單����,使用方便。由于其內(nèi)部由高速電動(dòng)機(jī)提供原始動(dòng)力����,可以產(chǎn)生大力矩。能夠較好的滿足系統(tǒng)要求����,方向可用于控制前輪轉(zhuǎn)動(dòng)角度����,可實(shí)現(xiàn)避障����、循跡和尋光功能。因此我們選擇此方案����。
1.5電機(jī)驅(qū)動(dòng)電路
方案1:采用直流電機(jī)驅(qū)動(dòng)芯片MC338886����,驅(qū)動(dòng)電流可達(dá)2A,外圍器件簡(jiǎn)單����,貼片封裝體積小, 但調(diào)速時(shí)MC338886發(fā)熱量很大,導(dǎo)致MC338886的FS引腳置位����,從而使其不工作,特別是采用反向制動(dòng)后置這這只這種情況更嚴(yán)重����。
方案2: 采用直流電機(jī)驅(qū)動(dòng)芯片L
6����、298N����,驅(qū)動(dòng)電流總和可達(dá)到4A,它可以驅(qū)動(dòng)二相和四相步進(jìn)電機(jī)的專用芯片����,我們利用它內(nèi)部的雙H(如圖1)橋式電路來驅(qū)動(dòng)直流電機(jī),這種驅(qū)動(dòng)電路可以 很方便實(shí)現(xiàn)直流電機(jī)的四象限運(yùn)行����,分 別對(duì)應(yīng)正轉(zhuǎn)、正轉(zhuǎn)制動(dòng)����、反轉(zhuǎn)、反轉(zhuǎn)制動(dòng)����。控制比較簡(jiǎn)單����,電路也很簡(jiǎn)單����。因此我們選擇此方案����。
1.6顯示模塊
方案1:采用LED顯示器,它采用低電壓掃描驅(qū)動(dòng),亮度高����、刷新速率快,但是功耗高����、顯示字符不美觀����。綜合考慮后,放棄此方案����。
方案2: 采用LCD顯示器,LCD的優(yōu)點(diǎn)主要包括零輻射����、低功耗����、散熱小����、體積小、圖像再現(xiàn)精確����、字符顯示美觀等,便于安裝����。而且現(xiàn)在LCD技術(shù)很成熟,在顯示器的市場(chǎng)比LED占的比重要大����,
7、因此我們選擇此方案����。
1.7循跡模塊
方案1:采用發(fā)光二極管發(fā)光,用光敏二極管接受����。當(dāng)發(fā)光二極管發(fā)出的可見光照射到黑線時(shí)����,光線被黑線吸收����。光敏二極管檢測(cè)到信號(hào),呈高阻抗����,使輸出端為低電平。當(dāng)發(fā)光二極管發(fā)出的可見光照射到地面時(shí)����,它發(fā)出的可見光反射回來被光敏二極管檢測(cè)到,其阻抗迅速降低����,此時(shí)輸出端為高電平����。但是由于二極管受環(huán)境中的可見光影響較大,且電路的穩(wěn)定性差����。
方案2:使用紅外對(duì)管����,特點(diǎn)是價(jià)格低����、體積小、質(zhì)量輕����、對(duì)小車的轉(zhuǎn)向不會(huì)造成影響,其抗光干擾能力強(qiáng)����,靈敏度高響應(yīng)快,光電轉(zhuǎn)換速度快����,
1.8尋光模塊
方案1:使用光敏電阻檢測(cè)光源時(shí),其光照特性為非線性����、反應(yīng)靈敏度一般,檢測(cè)距離范圍
8����、有限����,其受外部影響較大����,檢測(cè)信號(hào)易出現(xiàn)誤差,故放棄使用此方案����。
方案2:使用光電三極管自制追光傳感器。光電三極管靈敏度高����,線性好,能將光信號(hào)轉(zhuǎn)變成電信號(hào)����,便于判斷。其溫度變化對(duì)光電流影響較小����,且便于安裝在小車上����,此方案價(jià)格低廉����,可靠性良好����,能滿足此系統(tǒng)的要求,所以我們選擇此方案����。
1.9檢測(cè)金屬模塊
方案1:使用接近開關(guān):它即有行程開關(guān)、微動(dòng)開關(guān)的特性����,同時(shí)具有傳感性能,其動(dòng)作可靠����,性能穩(wěn)定,頻率響應(yīng)快����,應(yīng)用壽命長(zhǎng),抗干擾能力強(qiáng)等����、并具有防水����、防震����、耐腐蝕等特點(diǎn)。當(dāng)金屬檢測(cè)體接近開關(guān)的感應(yīng)區(qū)域����,開關(guān)就能無接觸,無壓力����、無火花、迅速發(fā)出電氣指令����,準(zhǔn)確反應(yīng)出運(yùn)動(dòng)機(jī)構(gòu)的位置和行程,即使用于
9����、一般的行程控制,其定位精度����、操作頻率、使用壽命����、安裝調(diào)整的方便性和對(duì)惡劣環(huán)境的適用能力,是一般機(jī)械式行程開關(guān)所不能相比的����。
觸點(diǎn)開關(guān):是傳統(tǒng)的按鈕開關(guān),通過接觸觸點(diǎn)來控制開關(guān)的通斷����。電路抗靜電能力較弱,很容易靜電損壞����。不適用在高溫,防潮����,耐腐蝕的地方。
1.10電源模塊
方案1采用若幾節(jié)干電池串聯(lián)供電����。干電池有較強(qiáng)的電機(jī)驅(qū)動(dòng)能力以及穩(wěn)定的電壓輸出性能����。但是����,攜帶電池盒會(huì)影響整體布局,在小型電動(dòng)車上使用不方便����,且不能很好的利用太陽(yáng)能充電系統(tǒng)。因此我們放棄了此種方案����。
方案2:采用7.2V蓄電池為系統(tǒng)供電。7.2V電壓蓄電池經(jīng)過LM7805����、LM7806穩(wěn)壓后,可為電機(jī)的驅(qū)動(dòng)和單片機(jī)系統(tǒng)的工作提供穩(wěn)定的電壓����,且攜帶方便,便于調(diào)整布局����,綜合考慮����,選用了此方案����。
1.11PWM調(diào)速的優(yōu)點(diǎn)
PWM調(diào)速主要是針對(duì)功率較小的低慣量電機(jī),具有高的定位速度和精度����,低速性能好,穩(wěn)速精度高,調(diào)速范圍寬,系統(tǒng)頻帶寬,動(dòng)態(tài)響應(yīng)好,抗干擾能力強(qiáng)����,且經(jīng)濟(jì)可靠,因而有很大的使用價(jià)值����。
調(diào)壓調(diào)速主要是針對(duì)饒線式電機(jī),通過串電阻調(diào)壓調(diào)速����。價(jià)格便宜。在一些精度要求不高����,低電壓時(shí)力矩小����,調(diào)速范圍小的場(chǎng)合����。足已。
 循跡避障點(diǎn)尋光自動(dòng)小車
循跡避障點(diǎn)尋光自動(dòng)小車