《3關(guān)節(jié)平面機(jī)械臂運(yùn)動學(xué)方程》由會員分享�����,可在線閱讀����,更多相關(guān)《3關(guān)節(jié)平面機(jī)械臂運(yùn)動學(xué)方程(5頁珍藏版)》請在裝配圖網(wǎng)上搜索����。
1���、機(jī)械手臂的運(yùn)動學(xué)公式推導(dǎo)
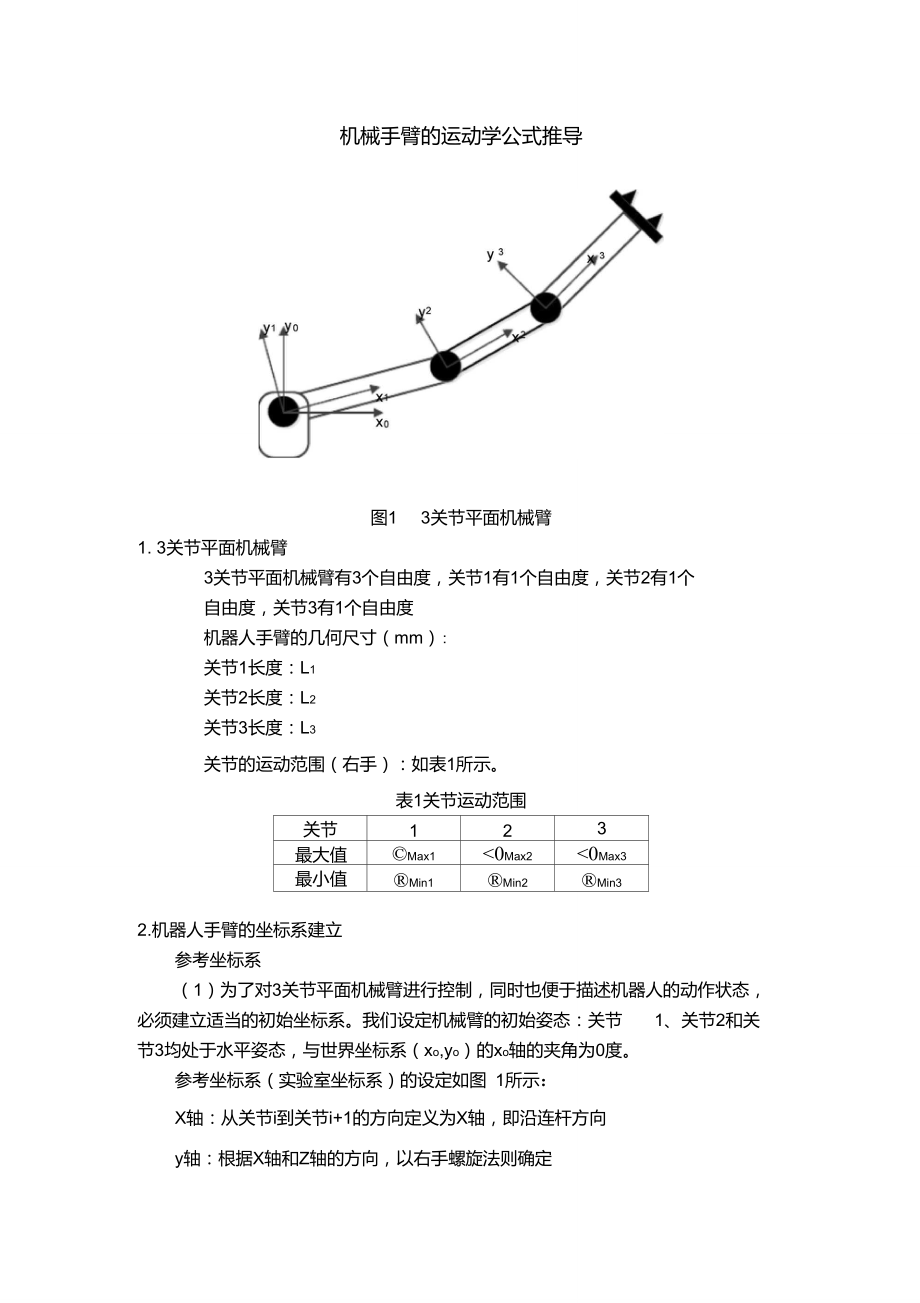
圖1 3關(guān)節(jié)平面機(jī)械臂
1. 3關(guān)節(jié)平面機(jī)械臂
3關(guān)節(jié)平面機(jī)械臂有3個自由度�����,關(guān)節(jié)1有1個自由度����,關(guān)節(jié)2有1個 自由度�����,關(guān)節(jié)3有1個自由度
機(jī)器人手臂的幾何尺寸(mm):
關(guān)節(jié)1長度:L1
關(guān)節(jié)2長度:L2
關(guān)節(jié)3長度:L3
關(guān)節(jié)的運(yùn)動范圍(右手):如表1所示�����。
表1關(guān)節(jié)運(yùn)動范圍
關(guān)節(jié)
1
2
3
最大值
Max1
<0Max2
<0Max3
最小值
Min1
Min2
Min3
2.機(jī)器人手臂的坐標(biāo)系建立
參考坐標(biāo)系
(1)為了對3關(guān)節(jié)平面機(jī)械臂進(jìn)行控制,同時也便于描述機(jī)器人的動作狀態(tài)��, 必須建立適當(dāng)?shù)某跏?/p>
2���、坐標(biāo)系。我們設(shè)定機(jī)械臂的初始姿態(tài):關(guān)節(jié) 1���、關(guān)節(jié)2和關(guān)
節(jié)3均處于水平姿態(tài)��,與世界坐標(biāo)系(xo,yo)的xo軸的夾角為0度����。
參考坐標(biāo)系(實(shí)驗(yàn)室坐標(biāo)系)的設(shè)定如圖 1所示:
X軸:從關(guān)節(jié)i到關(guān)節(jié)i+1的方向定義為X軸�,即沿連桿方向
y軸:根據(jù)X軸和Z軸的方向��,以右手螺旋法則確定
Z軸:沿關(guān)節(jié)軸方向�����,即垂直紙面��,從里向外為 Z軸正方向�
(2)連桿參數(shù)
連桿參數(shù)列表如表2所示
C1
-S1
0
0
0T =
lS
0
0!
丨A
I 0
1
0
[0
0
1 一
■C2
1
_S2
0
LJ
1
��;T =
IS2
3���、1
C2
0
0
1
10
1
0
1
0
.0
0
0
1 一
C3
_S3
0
呵
2t =
IS3
C3
0
0
31
I0
0
1
0
0
0
0
1 一
—(si C2C3 C1S2C3 C1C2S^ _ S1S2S3)
qC2C3 1 S1S2C3 -sqq 1 qC2S3
0
0
C1C2C^ _ SIS2C^ _C1S2S^ _ S1C2S3
SIC2C^ "*"C1S2C^*"C1C2S3 _ S1S2S3
0
I 0
0
0
1
0
L1c^ +L^c1c^s1s2 )
4����、
Ll5 + L2 ( sc2 +5% )
0
1
(1)
C123
S123
0
I -0
_S123
L1C1
C123
L2c12
L2SI2
表2連桿參數(shù)
連桿i
ai-1
a i-1
di
Oi
關(guān)節(jié)變量范圍
1
0
0
0
01
0Min1 ?@Max1
2
L1
0
0
02
0Min2 ?0Max2
3
L2
0
0
O3
OMin3 ?0Max3
正解:
連桿之間的齊次變換矩陣為:
�
「C
0
xl
1
0
yl
1 0
1
0
1
0
.
5、0
0
0
1 一
其中
C1: cos
(5)
(6)
c2: cos2
s1: sinG^
s1: sinG (7)
C - C123 (8)
s = si23 (9)
x = L)C| L2q2 (10)
~ Lisi L2s12 (11)
式(1)為3關(guān)節(jié)平面機(jī)械臂的變換矩陣�����,式(2)為采用三角函數(shù)和差角公式化 簡得到的��,式(3)為式⑵的簡化表示��,式(4)-式(11)為簡化符號的詳細(xì)表示����。
反解:
幾何解:
* y0
圖2 3關(guān)節(jié)平面機(jī)械臂的平面幾何關(guān)系
圖2給出了 3關(guān)節(jié)平面機(jī)械臂的幾何關(guān)系�,可以看出��,在
6��、世界坐標(biāo)系(xo,yo)�下,由連桿Li,L2以及關(guān)節(jié)1和關(guān)節(jié)3的連線構(gòu)成三角形����。圖中虛線所示為構(gòu)成三 角形的另一種情況��,對于實(shí)線構(gòu)成的三角形�,采用余弦定理可得
X2 y2 =『 L22 -2IhL2COS(180 二2) (12)
由于 cos(180+62)=-cos62,所以
L12 L2:
2L丄2
(13)
5
三角形成立的條件為 2邊之和大于第三邊�����,因此 L1+L2必須大于
?,x2—y2�?����?衫蒙鲜綑z驗(yàn)反解是否存在����,當(dāng)上述條件不成立時�����,反 解不存在��。當(dāng)反解存在時�����,即可由(13)式得出G2的值���。
為求⑨���,可先求出B和収根據(jù)三角函數(shù)與三角形各邊的關(guān)系����,
(14)
(15)
(16)
應(yīng)用2幅角反正切公式得:
:=Ata n 2( y, x)
cos?=
X2 y2 _L12 _L22
2L1 ,x2 y2
再利用余弦定理求出
式中,+-號根據(jù)G2的符號取�����,當(dāng)62<0,取正號�����,反之取負(fù)號��。
平面內(nèi)旋轉(zhuǎn)角度可加和���,因此3個連桿的旋轉(zhuǎn)角度之和即為末端連桿 的姿態(tài)����,也即機(jī)械臂末端的姿態(tài)。
玉八 (17)
由以上式(1)-式(17)��,可反解出所有連桿在世界坐標(biāo)系的變換矩陣��,
即姿態(tài)����。
#
 3關(guān)節(jié)平面機(jī)械臂運(yùn)動學(xué)方程
3關(guān)節(jié)平面機(jī)械臂運(yùn)動學(xué)方程